ⓒ copyrights 2003-2018 Designersparty, all rights reserved. all material published remains the exclusive copyright of Designersparty.

|
|
|
|
|
 |
 |
 |
 |
 |
 |
 |
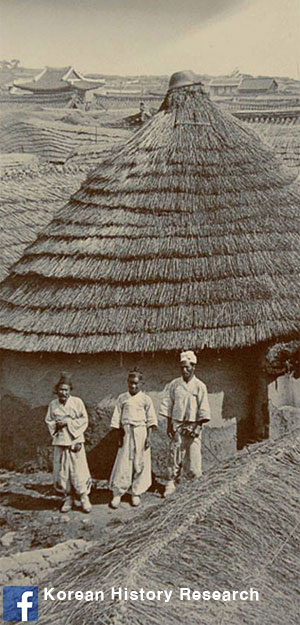
Korean History Rearch Project 2012. 6. 27 ~

BR3 Project/Furnitur Brand 3 Project 2014 ~2017