
PIRO Quadruped Version 1, 40kg, 552*556*400mm
This demonstration shows trot gait on the treadmill
POSTECH

|
PIRO Quadruped Version 1, 40kg, 552*556*400mm
This demonstration shows trot gait on the treadmill
POSTECH

Hyper R1 wearable robot , Leg muscle support wearable robot for firefighters
FRTechnology/KITECH

Hyper 2 20kg

Hyper 2 40kg

Hyper 1 100kg
KITECH
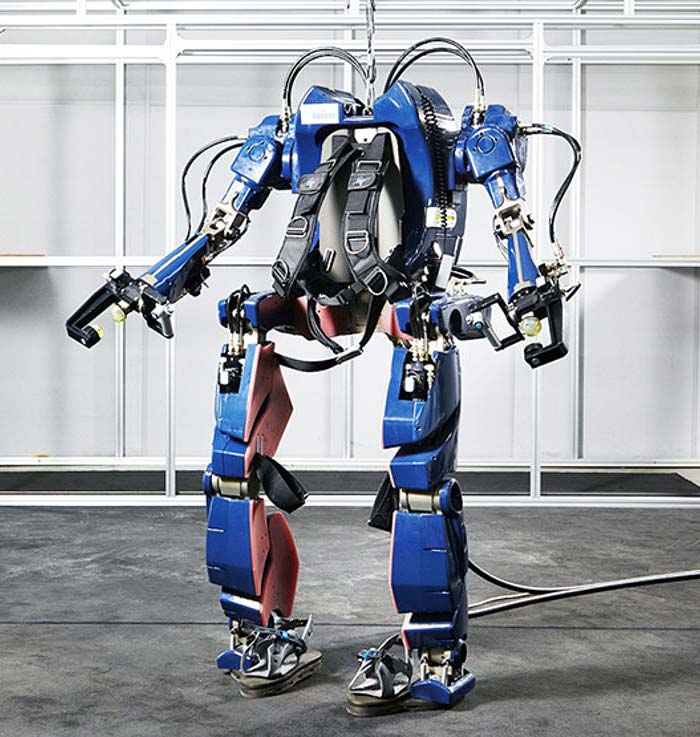
Hyundai is apparently branching out into a very different kind of transportation. The Korean carmaker is developing a robotic exoskeleton that increases the wearer’s strength significantly.
Hyundai displays their mechanical exoskeleton suit prototype. The company’s suit is a dark-blue exoskeleton mech robot with a safety harness in it. The user can move the arms freely and the vast ‘alien style’ mechanical legs that have a tackle to position the feet into.

Hyundai is on a mission to manufacture fully mechanized suits that allows users to infuse robotics into everyday tasks. the hyundai exoskeleton can lift up to 50 kilograms over long distances and supervising super-human duties.
The progress being made is part of the company’s ‘next mobility’ project which plans to help paraplegics, the physically disabled and the elderly, as well as hyundai’s workers on the manufacturing line. similar programs by suitX, berkeley bionics and lockheed martin have made the news as well. with progress being made so quickly, by so many companies, exoskeletons have the possibility to be ready for mass production within the next decade.

Hyundai actually has some previous experience with robot suits. Last year, it unveiled the H-LEX “wearable walking assistant.” This was a much lighter-duty apparatus meant to help senior citizens walk. The company also showed a scaled-down version of its new exoskeleton, with leg pieces only, designed for a similar purpose. The larger version could be used by factory workers, who already use standalone robots to do their jobs.

"This wearable robot that we are developing for commercial purposes will be used in diverse areas," a company official said.
According to Hyundai, the suit can increase the productivity of the workers significantly and lower accidents that cause hip and knee injuries. It will be useful in a workplace where people needs to lift over a hundred of kilograms objects, they added. Similarly, the ‘wearable robot’ can also be used by soldiers to run long distances without breaking a sweat. Even they are carrying 50 kilograms of equipment.

"Such a robot development is in line with Hyundai Motor Group's vision for free mobility of people and things."
The company also aims that their technology will also help people with disabilities or limited mobility. Furthermore, the company offers an exoskeleton version that the civilians can wear which gives the user stability. The suit can help elders to walk around independently and also to be a part of the rehabilitation programs for the patients with injuries.
Hyundai Motor Group
|
|
 |
 |
 |
 |
 |
 |
 |
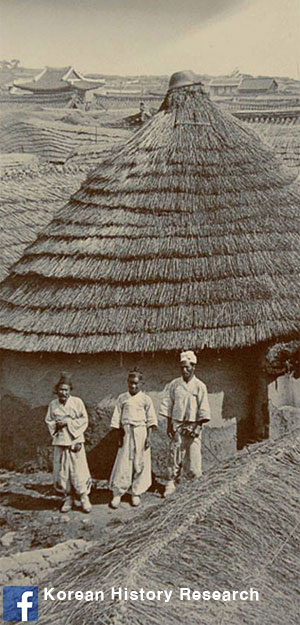
Korean History Rearch Project 2012. 6. 27 ~

BR3 Project/Furnitur Brand 3 Project 2014 ~2017