ICA 2001 520 x 100 cm plaster, LED
Icarus was human, who first fly to sky in the world, But, he was dead, too close to sun, in Greek myth. ICA was make around10,000 unit and module and close to human working style. don’t want to make robot to same human being. 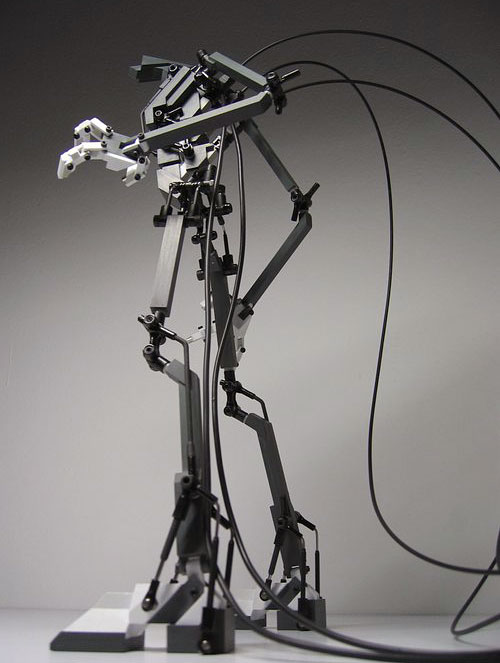
Das Royd 2002 520 X 120 plaster, LED
In 2005 and 2006, the Das Royd was a concept model with robot structure design by Lee Dae Suk (ICA), the CEO of Roy n’ Block and award-winning leader in next generation design from Knowledge Economy Minister in Korea. Reason of making new robot’s structure and unit, module is future for human being.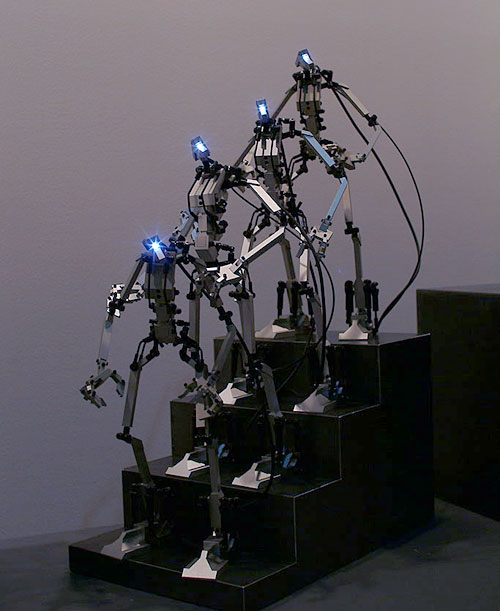
Das Royd’s clone 2006 520 x 120 Plaster, LED, Aluminum
These were the aluminum works invited to the exhibit. The unique structure and shape caused a lot of attention at home and abroad.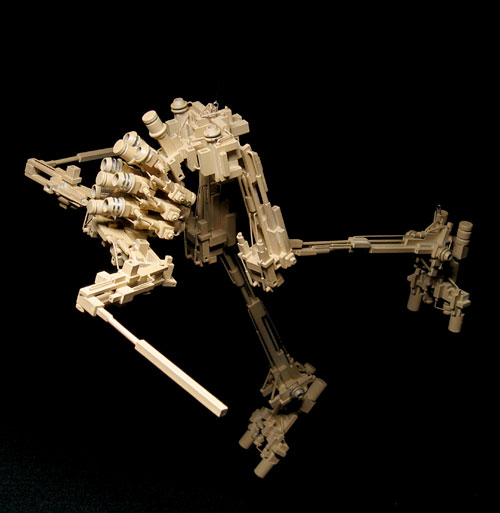
ICA 2001 520 x 100 cm plaster, LED
Lee Dae Suk has attempted to combine the field of RT (robot technology) to design with a new angle on structural analysis and proposal under the new paradigm in terms of industry, and accordingly a variety of robot motion and energy efficiency have been proposed.
In addition, he has also presented to the forums and exhibited “ICA series-the robot structure in order to popularize the robot and its culture, and he planned MECHA-POD (battle robot toy) with the robot and its structure applied to the toy industry.
As MECHA-POD being produced and managed by himself, he led the companies in the same field with presenting its own revenue model. Currently, the MECHA- POD were sold out 20,000 in the United States, and local marketing and new robot product development is proceeding.
Roy n’ Block