ROBHAZ - Robots for Hazardous Application
Teleoperated Mobile Platform with Passively Adaptive double track for Hazardous Environment Applications
The Korea Institute of Science and Technology (KIST) said that it has commercialized `Robhaz-DT3`, the third version of its `Robhaz`, a high performance robot that can work in hazardous environments.
KIST said it has developed the new hazardous situation-working robot over the past five years in conjunction with Yujin Robotics, the Korea Advanced Institute of Science and Technology (KAIST) and Seoul National University.
The new robot is designed to adjust to uneven terrains and run at a maximum speed of 10km even in a slope with an inclination angle of 45 degrees, and its control system is stabilized as it is installed with Linux operating system, according to KIST. It can conveniently be controlled remotely.
`Robhaz` can widely be used for rescuing people in hazardous or dangerous situation due to disasters such as fire and earthquake, exploring regions polluted by radioactivity or toxic materials, and for detecting and removing explosives.
The institute has transferred mobile mechanism of `Robhaz` to Yujin Robotics, and a large number of other firms including Rotem and LG Innotek plan to commercialize the new model of `Robhaz`.
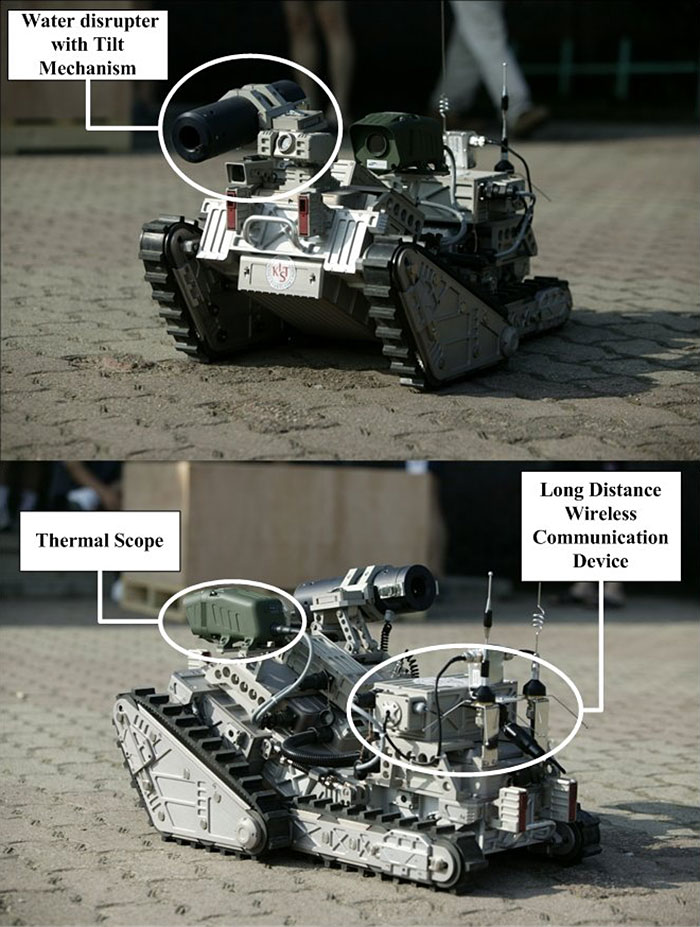
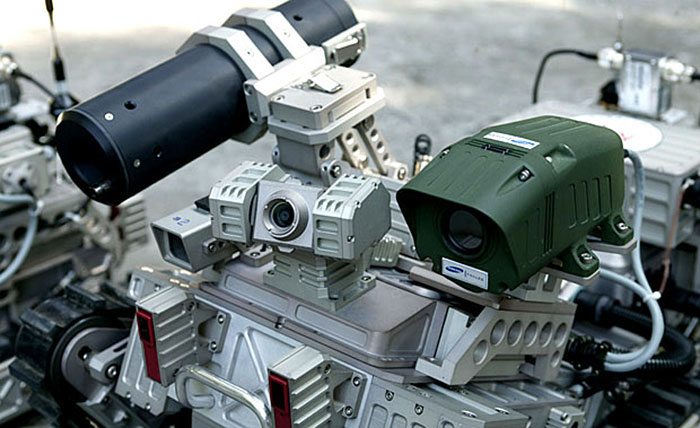
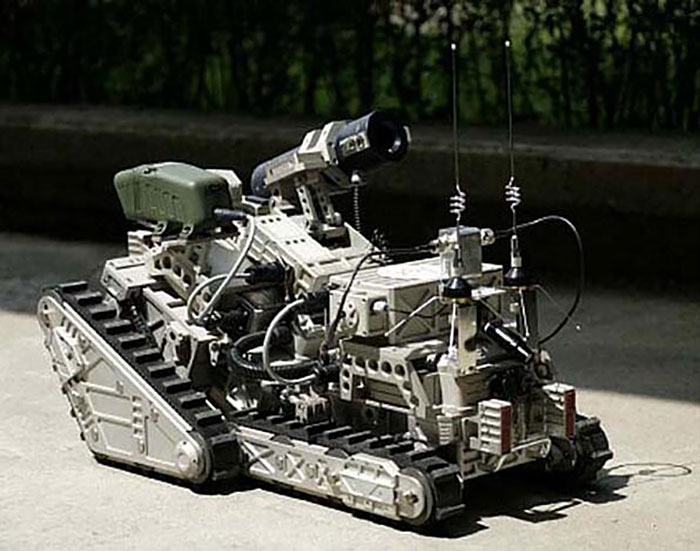
In this paper, design and integration of the ROBHAZ-DT3 are introduced which is a newly developed mobile robot system with double tracks. It is designed to curry out military and civilian missions in various hazardous environments.
The rotational passive adaptation mechanism equipped between the front and rear body enables the ROBHAZ-DT3 to have good adaptability to uneven terrain including stairways.
The passive adaptation mechanism reduces energy consumption in moving on uneven terrain as well as it offers simplicity in design and teleoperation. Based on this new design concept, dynamic simulation was conducted to determine the significant parameters such as optimal track size and allowable attack angle.
Also dynamic effects in vehicle turning are investigated to assess proper load torque. The ROBHAZ-DT3 system developed was successfully experimented in stair climbing case.
Lobhaz