Bubble Talk 2019
In this art project, the ephemeral and intangible aspects of human’s communication are represented by soap-bubble.
The shapeless, intangible, and insubstantial speech - once the speech is shouted out through speaker’s mouth it disappears unless someone hears it immediately, or even it is heard, the message will be forgotten as time goes - is transferred to a semi-tangible yet still fleeting bubble.
The bubble machine that we created provides person-to-person and person-to-space interaction. The machine has a iris mechanism that varies its outlet size reacting to the participant’s speech pattern as if it tries to talk something.
Once the participant pauses, the machine blows out various sizes of bubble. The floating bubble represents the subtle state of a message from interpersonal communications that lies in the middle of real and digital world. Also, it creates a certain delay until it pops, which is a metaphor of our behavior that we often delay to send out text-messages through chatting apps.
We believe that anyone can be an artist. By opensourcing the details of fabrication process and materials, we want to encourage people to build the machine, interact with it at any locations, and use and modify it as a art tool for realizing their own ideas whether it is for art or not.
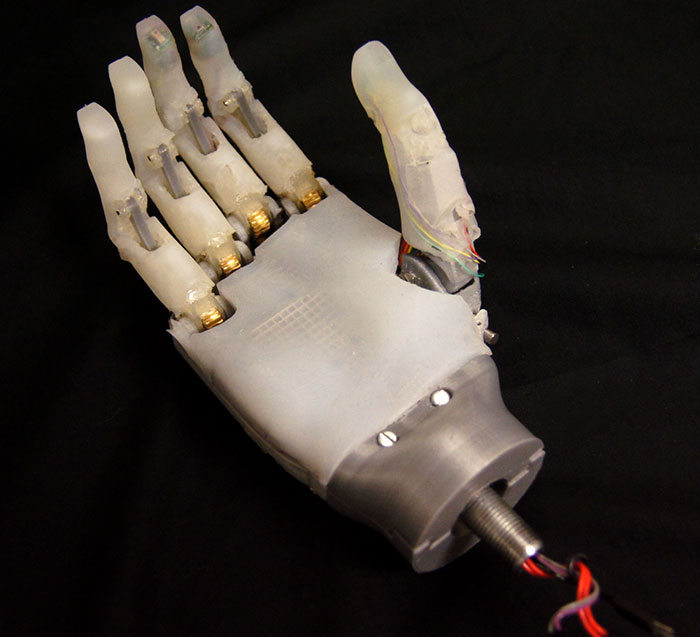
A low-cost, open-source, compliant hand for enabling sensorimotor control for people with transradial amputations
In this paper, we describe the design and implementation of a low-cost, open-source prosthetic hand that enables both motor control and sensory feedback for people with transradial amputations.
We integrate electromyographic pattern recognition for motor control along with contact reflexes and sensory substitution to provide feedback to the user. Compliant joints allow for robustness to impacts. The entire hand can be built for around $550.
This low cost makes research and development of sensorimotor prosthetic hands more accessible to researchers worldwide, while also being affordable for people with amputations in developing nations.
We evaluate the sensorimotor capabilities of our hand with a subject with a transradial amputation. We show that using contact reflexes and sensory substitution, when compared to standard myoelectric prostheses that lack these features, improves grasping of delicate objects like an eggshell and a cup of water both with and without visual feedback. Our hand is easily integrated into standard sockets, facilitating long-term testing of sensorimotor capabilities.
ambienBeat 2020
We present a wrist-worn mobile heart rate regulator – ambienBeat– which provides closed-loop biofeedback via tactile stimulus based on users’ heartbeat rate (HR).
We applied the principle of physiological synchronization via touch to achieve our goal of effortless regulation of HR, which is tightly coupled with mental stress levels. ambienBeat provides various patterns of tactile stimuli, which mimics the feeling of a heartbeat pulse, to guide user’s HR to resonate with its rhythmic, tactile patterns.
The strength and rhythmic patterns of tactile stimulation are controlled to a level below the cognitive threshold of an individual’s tactile sensitivity on their wrist so as to minimize task disturbance. Here we present an acoustically noise-less soft voice-coil actuator to render the ambient tactile stimulus and present the system and implementation process.
We evaluated our system by comparing it to ambient auditory and visual guidance. Results from the user study shows that the tactile stimulation was effective in guiding user’s HR to resonate with ambienBeat to either calm or boost the heart rate using minimal cognitive load.
reMi 2018
We present a tangible memory notebook–reMi–that records the ambient sounds and translates them into a tangible and shareable memory using animated paper.
The paper replays the recorded sounds and deforms its shape to generate synchronized motions with the sounds. Computer -mediated communication interfaces have allowed us to share, record and recall memories easily through visual records.
However, those digital visual-cues that are trapped behind the device’s 2D screen are not the only means to recall a memory we experienced with more than the sense of vision.
To develop a new way to store, recall and share a memory, we investigate how tangible motion of a paper that represents sound can enhance the “reminiscence”.
Kyung Yun (goes by Yun) is an engineer, designer, and artist. The overarching aim of her research efforts has always been to create a new interactive interface that extends the space of user experience by enabling the engagement of our various perceptions with the improved embodiment. To this end, she focuses on soft robotics, multi-functional composite structure and material, and digital fabrication.
Before joining the Media Lab, Kyung Yun has worked on developing two Cube satellites as a chief engineer of the structural and thermal control system in conjunction with NASA GSFC. Also, she has worked on developing a myoelectric prosthetic hand as a lead mechanical engineer at the bionic hand start-up. She received her B.S in Mechanical Engineering from Yonsei University, Seoul, South Korea and her M.S in Aerospace Engineering from University of Illinois at Urbana-Champaign.
Kyung Yun is a recipient of the Korean Government Scholarship for Study Overseas in 2014, and the Kwanjeong scholarship for the graduate study in 2017.
Kyung Yun